
- 2130
- 产品价格:11410.00 元/台 起
- 发货地址:河南新乡 包装说明:不限
- 产品数量:10.00 台产品规格:不限
- 信息编号:223786399公司编号:23089950
- 张银丽 高管 微信 19337383020
- 进入店铺 在线咨询 QQ咨询 在线询价
天津无轨电动平车 铁路无轨平车厂家 潍坊无轨电动平车 无轨 电动平板车
- 相关产品:
无轨电动平板车
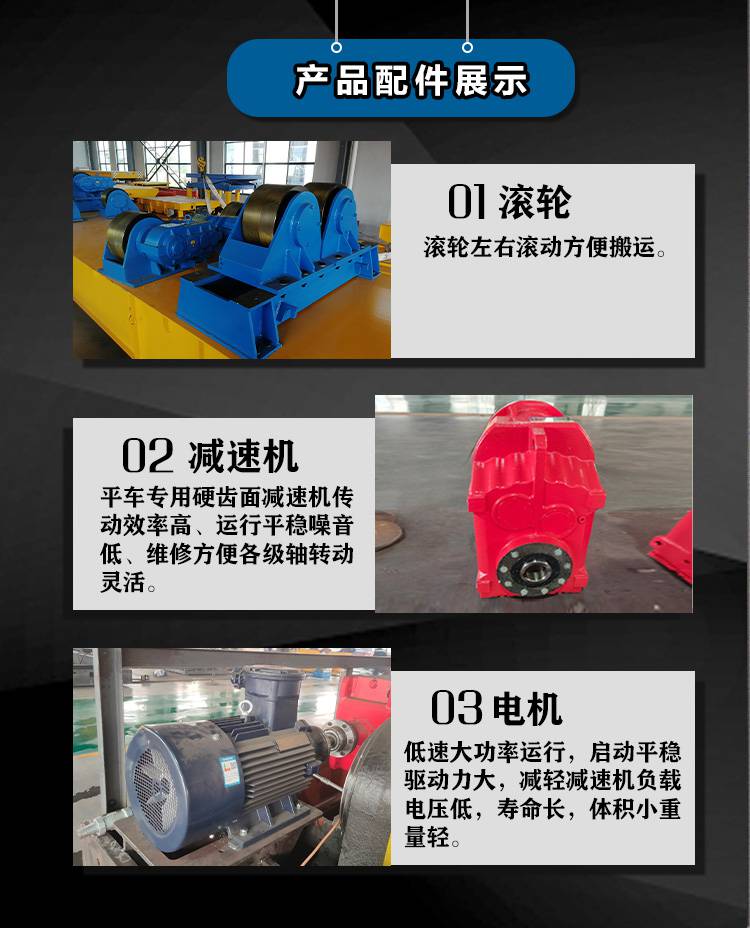
工作原理
采用四轮驱动,转向依靠两主动轮的差速实现。转向灵活,又有足够的稳定性。定位方案采用磁钉导航定位,可增加视觉导航实现精确定位。增加色带的情况下,能够实现自动导航。顶升机构采用凸轮机构,结构简单,同时控制凸轮旋转的电机旋转方向不必变换,只需朝一个方向旋转就可以实现顶升机构的往复直线运动。
案例现场
项目地点:深圳车间AGV自动化平板车
运输工件:机器
转弯原理:差速
介绍:客户购买AGV自动化平板车主要运机器设备,由于机床比较大,起重机来回吊装运输不方便,采用无轨平车运输起来方便高效。





联系手机是19337383020, 主要经营轨道平车、无轨平车、电动平车、agv转运设备。
单位注册资金单位注册资金人民币 500 - 1000 万元。
- 产品分类
{kind=link}